
如何控制步进电机
日期: 2019-04-29 分类: 跨站数据测试 308次阅读
了解如何使用Arduino UNO开发板控制步进电机,以便在机器人中实现更精确的运动。
本篇文章将主要向您介绍如何控制步进电机以实现精细旋转和完美的角度控制 - 这是机器人项目的关键技能。
所需的硬件
● 步进电机
● ULN2003驱动芯片
● Arduino Uno开发板
● 面包板
为何使用步进电机?
步进电机是带有许多内齿的无刷直流电机,可以通过周围的铜线圈磁性锁定到位。与无刷电机不同,向步进电机供电不会使其转动。相反,它锁定到由给定输入指定的位置,并顺时针或逆时针转动一小步。
虽然这使得驱动步进电机更加复杂,但与无刷直流电机相比具有一个主要优势:它们的角位置可以非常精确地指定。例如,如果您希望电机正好旋转270度,那么使用普通直流无刷电机(没有某种形式的反馈)几乎是不可能的,但使用步进电机会很轻松。
步进电机需要多个步进脉冲才能到达您想要的位置。此外,步进电机线圈始终通电,大大增加了保持转矩,但强制转动则很困难。这些优点解释了为什么步进电机常用于许多应用,包括CNC机床和CD / DVD驱动器。
步进电机分为两个相位:单极和双极。单极电机包含连接所有线圈的公共电源,而双极电机具有分离的线圈。
本文仅介绍单极电机,因为双极电机需要以不同的方式驱动。
原理
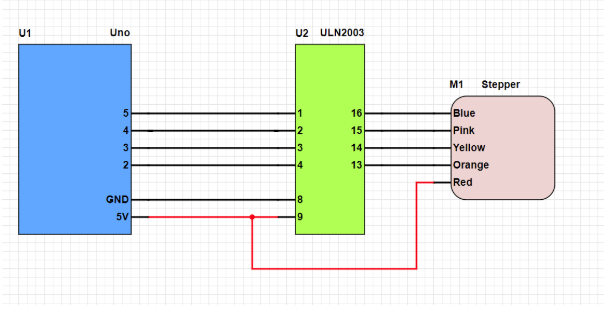
步进电机原理图
更多内容请参考以下链接:https://www.yiboard.com/thread-1149-1-1.html
除特别声明,本站所有文章均为原创,如需转载请以超级链接形式注明出处:SmartCat's Blog
标签:一板网电子论坛 步进电机
精华推荐